
الهيكل الأساسي لوحدة الكاميرا
I. هيكل الكاميرا ومبدأ العمل
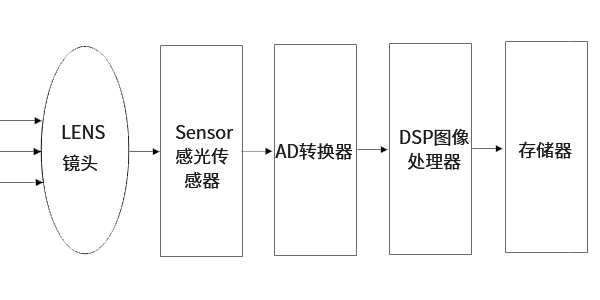
يتم تصوير المشهد من خلال العدسة ، ويتم عرض الصورة الضوئية المتولدة على المستشعر ، ثم يتم تحويل الصورة الضوئية إلى إشارة كهربائية ، والتي يتم تحويلها إلى إشارة رقمية من خلال التحويل التناظري إلى الرقمي.تتم معالجة الإشارة الرقمية بواسطة DSP ثم إرسالها إلى الكمبيوتر للمعالجة ، ثم تحويلها أخيرًا إلى صورة يمكن رؤيتها على شاشة الهاتف.
وظيفة شريحة معالجة الإشارات الرقمية (DSP): تحسين معلمات إشارة الصورة الرقمية من خلال سلسلة من الخوارزميات الرياضية المعقدة ، ونقل الإشارات المعالجة إلى أجهزة الكمبيوتر والأجهزة الأخرى عبر USB والواجهات الأخرى.إطار هيكل DSP:
1 ، ISP (معالج إشارة الصورة)
1. ISP (معالج إشارة الصورة)
2 、 JPEG encoder
2. جهاز تشفير JPEG
3 ، جهاز تحكم USB
3. جهاز تحكم USB
هناك نوعان من أجهزة استشعار الكاميرا الشائعة ،
أحدهما هو مستشعر CCD (Chagre Couled Device ، أي جهاز الشحن المزدوج.
الآخر هو CMOS - مستشعر أشباه الموصلات المعدنية بأكسيد المعادن التكميلي ، أي شبه موصل أكسيد معدني مكمل.
تكمن ميزة CCD في جودة التصوير الجيدة ، لكن عملية التصنيع معقدة ، والتكلفة عالية ، واستهلاك الطاقة مرتفع.بنفس الدقة ، CMOS أرخص من CCD ، لكن جودة الصورة أقل من CCD.بالمقارنة مع CCD ، فإن مستشعر صورة CMOS لديه استهلاك أقل للطاقة.بالإضافة إلى ذلك ، مع تقدم تكنولوجيا العمليات ، تم أيضًا تحسين جودة صورة CMOS بشكل مستمر.لذلك ، فإن جميع كاميرات الهواتف المحمولة الحالية في السوق تستخدم مستشعرات CMOS.
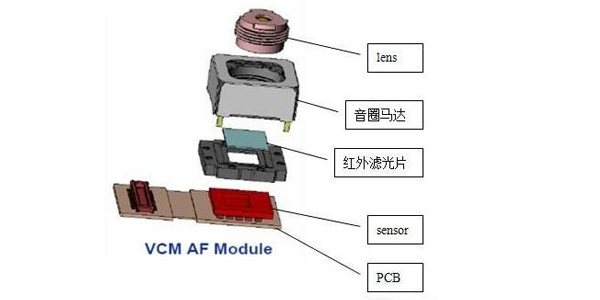
هيكل بسيط لكاميرا الهاتف المحمول
العدسة: اجمع الضوء واسقط المشهد على سطح وسيط التصوير.
مستشعر الصورة: وسيط التصوير الذي يحول الصورة (إشارة ضوئية) التي تعرضها العدسة على السطح إلى إشارة كهربائية.
المحرك: يحرك حركة العدسة ، بحيث تعرض العدسة صورة واضحة على سطح وسيط التصوير.
مرشح اللون: المشهد الذي تراه العين البشرية موجود في نطاق الضوء المرئي ، ويمكن لمستشعر الصورة التعرف على نطاق الضوء أكثر من العين البشرية.لذلك ، تمت إضافة مرشح ألوان لتصفية نطاق الضوء الزائد ، بحيث يمكن لمستشعر الصورة التقاط المشاهد الفعلية التي تراها العين.
شريحة محرك المحرك: تستخدم للتحكم في حركة المحرك وقيادة العدسة لتحقيق التركيز البؤري التلقائي.
ركيزة لوحة الدائرة: قم بنقل الإشارة الكهربائية لحساس الصورة إلى النهاية الخلفية.
ثانيًا.المعلمات والأسماء ذات الصلة
1. تنسيقات الصور الشائعة
1.1 تنسيق RGB:
التنسيق التقليدي باللون الأحمر والأخضر والأزرق ، مثل RGB565 و RGB888 ؛تنسيق البيانات 16 بت هو 5 بت R + 6 بت G + 5 بت B. G لديه بت واحد آخر لأن عيون الإنسان أكثر حساسية للون الأخضر.
1.2 تنسيق YUV:
تنسيق Luma (Y) + chroma (UV).يشير YUV إلى تنسيق البكسل الذي يتم فيه التعبير عن معلمة النصوع ومعلمة التلون بشكل منفصل.تكمن ميزة هذا الفصل في أنه لا يتجنب التداخل المتبادل فحسب ، بل يقلل أيضًا من معدل أخذ عينات الصبغ دون التأثير على جودة الصورة كثيرًا.YUV هو مصطلح أكثر عمومية.لترتيبها المحدد ، يمكن تقسيمها إلى العديد من التنسيقات المحددة.
يحدد Chroma (UV) جانبين من جوانب اللون: تدرج اللون والتشبع ، ويمثلهما CB و CR على التوالي.من بينها ، يعكس Cr الفرق بين الجزء الأحمر من إشارة إدخال RGB وقيمة السطوع لإشارة RGB ، بينما يعكس Cb الفرق بين الجزء الأزرق من إشارة إدخال RGB وقيمة سطوع إشارة RGB.
التنسيقات الرئيسية لأخذ العينات هي YCbCr 4: 2: 0 و YCbCr 4: 2: 2 و YCbCr 4: 1: 1 و YCbCr 4: 4: 4.
1.3 تنسيق بيانات RAW:
صورة RAW هي البيانات الأولية التي يقوم مستشعر الصورة CMOS أو CCD بتحويل إشارة مصدر الضوء الملتقطة إلى إشارة رقمية.ملف RAW هو ملف يسجل المعلومات الأصلية لمستشعر الكاميرا الرقمية وبعض البيانات الوصفية (مثل إعدادات ISO وسرعة الغالق وقيمة الفتحة وتوازن اللون الأبيض وما إلى ذلك) التي تولدها الكاميرا.RAW هي صيغة غير معالجة وغير مضغوطة ويمكن تصورها على أنها "بيانات أولية مشفرة بالصورة" أو تسمى بشكل أكثر وضوحًا "سلبية رقمية".يتوافق كل بكسل في المستشعر مع مرشح الألوان ، ويتم توزيع المرشحات وفقًا لنمط Bayer.يتم إخراج بيانات كل بكسل مباشرة ، أي بيانات RAW RGB
تصبح البيانات الأولية (Raw RGB) RGB بعد الاستيفاء اللوني.
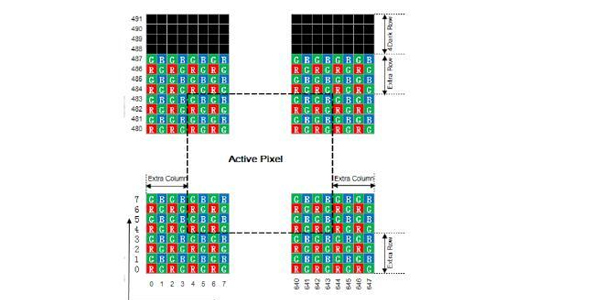
مثال على صورة بتنسيق RAW
2. المؤشرات الفنية ذات الصلة
2.1 دقة الصورة:
SXGA (1280 × 1024) ، 1.3 ميجا بكسل
XGA (1024 × 768) ، 0.8 ميجا بكسل
SVGA (800 × 600) ، 0.5 ميجا بكسل
VGA (640 × 480) ، 0.3 ميجابكسل (0.35 ميجابكسل تشير إلى 648 × 488)
CIF (352 × 288) ، 0.1 ميجابكسل
SIF / QVGA (320 × 240)
QCIF (176 × 144)
QSIF / QQVGA (160 × 120)
2.2 عمق اللون (عدد بتات اللون):
256 لونًا بمقياس رمادي ، 256 نوعًا من الرمادي (بما في ذلك الأسود والأبيض).
لون 15 أو 16 بت (لون عالي الجودة): 65.536 لونًا.
لون 24 بت (لون حقيقي): يحتوي كل لون أساسي على 256 مستوى ، وتشتمل مجموعتهم على 256 * 256 * 256 لونًا.
لون 32 بت: بالإضافة إلى لون 24 بت ، يتم استخدام 8 بت الإضافية لتخزين البيانات الرسومية للطبقة المتداخلة (قناة ألفا).
2.3 الزوم البصري والزوم الرقمي:
التكبير البصري: قم بتكبير / تصغير الكائن الذي تريد تصويره عن طريق ضبط العدسة.إنها تحافظ على البكسل وجودة الصورة بشكل أساسي دون تغيير ، ولكن يمكنك التقاط صورة مثالية.الزوم الرقمي: لا يوجد تكبير في الواقع.إنه يأخذ فقط من الصورة الأصلية ويكبر. ما تراه على شاشة LCD يتم تكبيره ، لكن جودة الصورة لم تتحسن بشكل كبير ، والبكسل أقل من الحد الأقصى للبكسل الذي يمكن للكاميرا تصويره.جودة الصورة لا تستحق في الأساس ، لكنها يمكن أن توفر بعض الراحة.
2.4 طريقة ضغط الصور:
JPEG / M-JPEG
H.261 / H.263
MPEG
H.264
2.5 ضوضاء الصورة:
يشير إلى التشويش والتداخل في الصورة ويظهر كضوضاء لونية ثابتة في الصورة.
2.6 توازن اللون الأبيض التلقائي:
ببساطة: استعادة الأجسام البيضاء بواسطة الكاميرا.المفاهيم ذات الصلة: درجة حرارة اللون.
2.7 زاوية الرؤية:
لها نفس مبدأ تصوير العين البشرية ، والذي يُعرف أيضًا باسم نطاق التصوير.
2.8 التركيز التلقائي:
يمكن تقسيم الضبط البؤري التلقائي إلى فئتين: الأولى هي ضبط البؤرة تلقائيًا استنادًا إلى المسافة بين العدسة والهدف ، والأخرى هي ضبط تلقائي للصورة لاكتشاف التركيز استنادًا إلى التصوير الواضح على شاشة التركيز (خوارزمية الحدة).
ملاحظة: التكبير هو تقريب الأشياء البعيدة.التركيز هو جعل الصورة واضحة.
2.9 التعريض التلقائي وجاما:
إنه مزيج من الفتحة والغالق.فتحة العدسة ، سرعة الغالق ، ISO.جاما هو منحنى استجابة العين البشرية للسطوع.
ثالثا.هيكل الكاميرا الأخرى

3.1 بنية ثابتة للكاميرا ذات التركيز البؤري
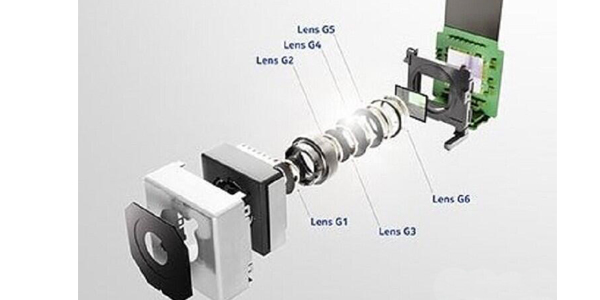
3.2 هيكل كاميرا تثبيت الصورة البصرية

3.3 كاميرا MEMS
الوقت ما بعد: 28 مايو - 2021




